

为什么说,无人机教学缺少无人机实验室的建立,无人机专业便失去了意义
为什么说,无人机教学缺少无人机实验室的建立,无人机专业便失去了意义?近年来,无人机技术在各行各业出现爆发式需求。无人机相关赛事、相关新闻越来越多。无人机专业与教育在一开始只存在于各大军工院校,到今天中、高职院校争先申请无人机技术应用相关专业。搭乘高校创新创业教育改革的快车和便车,无人机教育开始在各大高校中落地生根。

高校无人机教育实践过程中面临的问题
师资问题
当前,无人机教育存在着师资严重匮乏的现象,这主要是由于无人机技术发展起步较晚和不够普及导致的。高校在无人机技术教育领域表现被动,而教师身兼数职,工作量大,无法做到术业专攻,深入投入到无人机教育研究当中,而学校又不能及时为教师提供最为前沿的相关技能技术的培训。
课程建设问题
各地区、各高校无人机技术教育课程设置不合理,不能把创新创业理念很好地融入无人机技术教育实践中去。无人机技术相关课程已经进入高校的第二课堂及公选课程中,但这些教学实施趋向于无人机的概念性讲解。无人机技术教育面临固守传统的课堂教学模式,师生互动性差,忽视了实践训练,出现了大班教学,一对多满堂灌等困难,致使学生对课程内容不感兴趣。
无人机实验室建设问题
无人机技术教育的实践环节受实践平台所限制,无法顺利进行动态教学,很难保证教学效果达到最佳状态。许多高校还不能为学生提供专门的实践教育基地,部分高校即使有创业实践平台,也不会面向全体学生,受众群体小。缺少无人机实验室做支撑,无人机技术教育就没有完整的教学过程、失去了无人机技术专业开设的意义,创新创业教育改革也将失去一道亮丽的风景线。
上述问题解决之法探讨
无人机技术是一门交叉学科,应遵循理实结合的一体化教学原则,更加注重实践。
(一)理论、技能型教师合作教学
无人机技术作为一门实践性很强的技术类型,更偏重于实践教学,在理论知识学习的基础上,需要实际动手,亲自实践,使学生们在动态教学中体验到乐趣,感受到科技魅力,从而激发创新思维。无人机技术教育需要培养理论型教师和技能型教师,因此可以建设一批职教师资培训基地和教师企业实践基地,为校内教师接受创新创业教育理念、获得技术技能提供学习实践平台,提高教师对专业知识的理解,更加注重实践。
(二)合理设置课程体系
培养无人机技术人才,课程设置是重要的一环。针对无人机技术教育而设置的课程都是由理论教学和实践教学共同组成的课程体系,以便于学生更好地理解、应用、实践。课时设置灵活,理论、实践课时占比可根据实际情况做出相应调整。将专业特色、学生兴趣、课程设置与创新创业教育理念统一起来,打造无人机技术独特的课程模式。
(三)实践平台不可或缺
无人机技术注重实践教育,受教育者只有在实践环节中才能更深层次地把握这一技术,切身地感受和真实地体验能够调动学生的创新创业热情,创新创业教育也能得到良好实施,一个先进完整的实践平台就显得尤为重要。学生们可以在实践中感受科技创新带来的视觉冲击,在实际操作中获得技术创新的成就感,从而唤醒学生的创新意识,激发学生的创新积极性。
无人机实践平台建设应涵盖的几大标准:
1、一室可开设多种课程
2、可帮助教师科研人员进行二次实验开发
3、应提供完整的视频、及相关教材指导,快速帮助老师完成教学备课
4、应配备相应的例程代码,方便学生快速掌握课程内容,通过实操,提高实际操控能力。
5、需提供无人机模型建立、无人机控制算法设计、软件在环仿真、硬件在环仿真等全套无人机系统设计开发环境。
无人机实验室建设方案:
方案概况
基于室内光学定位系统的室内多旋翼控制平台,可以快速实现多旋翼无人机的多项自主控制任务,譬如悬停、轨迹跟踪等,为控制类教学演示及二次开发实验提供核心设备支撑,同时还能帮助用户进行系统性教学研究,专业高效、便携易用,将大大促进控制类教学服务升级。能够提供无人机与基于模型设计的全套课程与全套提供无人机模型建立、无人机控制算法设计、软件在环仿真、硬件在环仿真等全套无人机系统设计开发环境

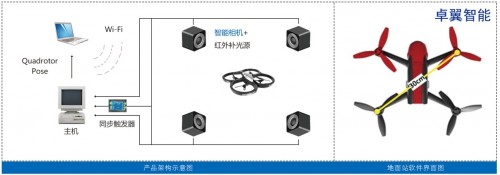
方案架构
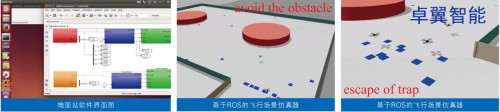
基于光学室内定位系统的室内多旋翼控制平台主要由以下4大部分组成:光学室内定位系统(含计算机)、多旋翼飞行器、基于Matlab或ROS的飞行场景仿真器和地面控制站(含计算机)、实验指导包(指导书、视频、例程)。
可开设多门课程:
多旋翼滤波器设计
多旋翼定点位置控制器设计
多旋翼路径跟随控制器设计
多旋翼跟踪控制器设计
多旋翼避障控制器设计
多旋翼区域覆盖决策设计
多机编队控制设计
多机投递决策设计
室内一体化多旋翼研发控制平台
室内一体化多旋翼控制研发设计平台由以下4大部分组成:多旋翼飞行器Matlab/Simulink由以下4大部分组成:多旋翼飞行器Matlab/Simulink模型、PixHawk自驾仪、硬件在环多旋翼飞行器仿真器、遥控器和接收机和实验指导包(指导书、视频、例程)。
平台统一,高效易用,强势助力科研
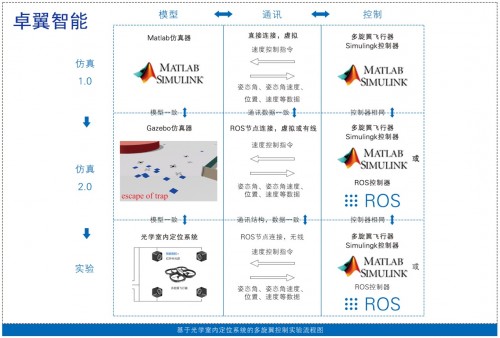
基于Matlab或ROS的飞行场景仿真器可较真实模拟真实飞行器的动态,并且可模拟节点通讯方式,方便后续仿真。Matlab或ROS的地面控制站可实时读取基于ROS的飞行场景仿真器、光学室内定位系统节点,还能读写真实多旋翼飞行器节点,从而能够在Matlab或ROS平台下统一地从仿真到真实实验,最终轻松完成多旋翼飞行器的控制。开发高效,能很好地帮助大专院生或科研工作者轻松实现自己的科研想法。
身材Mini续航久,与平台完美兼容
任何有ROS节点接口的多旋翼飞行器都可以与该平台完美兼容,目前平台采用的产品为Parrot Bebop2(通用货架产品),标重仅500g,轴距30cm,续航时间为25分钟。
权威教科书级指导,制定行业标准
实验指导书由与卓翼智能深度合作的北京航空航天大学可靠飞行控制研究组研发,紧扣该组出版的《多旋翼飞行器设计与控制》权威性教科书,是行业标准的制定者与标杆,对业内具有深刻、长远的指导作用。
视频和例程由浅入深,轻松上手
视频和例程由与卓翼智能深度合作的北京航空航天大学可靠飞行控制研究组制作,通过视频,专业老师由浅入深地为学生讲解实验的原理、步骤、目标等,并附有相应的配套例程代码,方便学生快速掌握、理解。进一步,通过实验实操,也将大大提高学生的实际操控能力,从而加深对书本理论知识的理解。
系统组成
多旋翼飞行器、基于Matlab或ROS的飞行场景仿真器和地面控制站(含计算机)、实验指导包(指导书、视频、例程)。
软件功能
支持Matlab或ROS的地面控制站软件、室内定位软件:各一套,开源,可实时读取基于ROS的飞行场景仿真器、光学室内定位系统节点,读写真实多旋翼飞行器节点,能够在Matlab或ROS平台下统一地从仿真到真实实验,完成多旋翼飞行器的单机或多机协同控制。
以上无人机实验室建设方案,供大家参考。无人机技术陆续登上各大高校的教育舞台,为创新创业教育增添了浓重的色彩,这对于高校无人机教育既是机遇,又是挑战。相信基于室内光学定位系统的室内多旋翼控制平台,会成为高校无人实验室中的佼佼者。


笔者获悉该技术团队由北京航空航天大学、清华大学、哈尔滨工业大学等知名高校毕业的博士和硕士组成,拥有多年教育类无人机系统的研发经验,卓翼智能公司与多个高校建立重点实验室合作,与北航、清华大学、浙江大学、哈工大等多所著名高校的飞行控制实验室建立长期深度合作。数位资历深厚的北航教授、副教授担任技术顾问,确保研发环境和设备的先进性及行业技术的前瞻性。在无人机设计开发系统、飞行控制、抗风稳定、slam视觉导航、集群与协同、高精度室内定位系统、无人车等多个领域拥有国内一流的核心技术,拥有国内多项技术专利。
免责声明:本文为商业广告,仅为传递更多信息之目的,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。




